什么是Flow?
从字面意思上理解,Flow就是流,在音视频领域,常常就能听到什么视频流、音频流,当然这些都可以统称为数据流。
在RKMedia当中,也存在一套基于Flow(流)的专门处理音视频流的框架。这里面还牵扯pipeline的概念,所谓pipeline就是一条独立的流水线,当每一帧的原始视频图像(一般是nv12格式)流入某条流水线后,会经过一些加工处理(比如对原始图像进行缩放、裁剪、编码等),最后输出的这一帧成品数据才会被推流到服务器,具体对一帧图像的加工就是由Flow负责,当然RKMedia把流水线思想用的特别精妙,因为加工也会分很多工序,所以对应的Flow的派生类也会分很多种。每种flow分工明确,只关注自己应该对图像的那一小部分工序,然后就把加工后的图像传递给下一级flow。
这里贴一张图,方便理解pipeline和Flow:
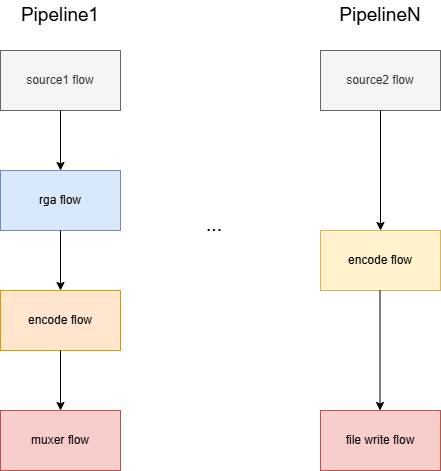
source flow会从相机当中读取图像数据。
rga对图像进行缩放。
encode对对图像进行编码。
muxer flow会将音视频进行一个再封装。然后推流到服务器。
Flow上下级如何交互的?
首先是有一个pipeline和flow的配置文件,配置文件描述了有几条pipeline,以及每条pipeline内部flow节点之间是什么关系,还有flow内部初始化必要的参数。
在我们的项目中,主要使用的是:ipcamera/app/mediaserver/src/conf/dc-rv1126-ipc/ipc-yuyv.conf。要添加一个flow节点首先就需要在此配置文件中定义一下flow必要的属性。
截取部分配置如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
| {
"Pipe_0": {
"Flow_0": {
"flow_index": {
"flow_index_name": "source_0",
"flow_type": "source",
"stream_id": "0",
"stream_type": "camera",
"upflow_index_name": "none"
},
"flow_name": "source_stream_mipi",
"flow_param": {
"name": "v4l2_capture_stream"
},
"stream_param": {
"device": "rkispp_m_bypass",
"frame_num": "6",
"height": "1520",
"output_data_type": "image:nv12",
"use_libv4l2": "1",
"v4l2_capture_type": "VIDEO_CAPTURE",
"v4l2_mem_type": "MEMORY_DMABUF",
"virtual_height": "1520",
"virtual_width": "2688",
"width": "2688"
}
},
},
"Pipe_1": {
},
}
|
在app下的Mediaserver中,flowmanager会根据配置文件中的flow_name的值通过反射创建具体的flow对象。每个flow的派生类都会在其构造函数中调用父类的Flow::InstallSlotMap方法去创建输入槽和输出槽,这两种槽可以简单理解为输入缓冲池和输出缓存池。
flowmanager在创建flow后会对flow进行初始化,此时会根据配置文件所描述的flow之间的上下级关系来调用上级的Flow::AddDownFlow,将父级的输出槽和子级Flow做绑定。将来,父级flow调用Flow::SetOutput可将处理后的图像数据传递给子级的flow。
这里补充一个细节:在调用Flow::InstallSlotMap方法时,除了槽的描述信息之外,还会向flow注册一个回调函数,该回调函数就是flow处理流进来的图像的核心函数,对于flow_type为io的flow,会在该回调函数的结尾调用Flow::SetOutput,最后会导致加工后的图像流向下一级flow。
于此,我们就有了向rkmedia添加flow节点的思路。
在项目中添加Flow的流程
事先声明一下,为方便,我这里直接添加了一个flow_type为sink的flow,添加io类型的flow其实同理。
修改配置文件
在配置文件ipcamera/app/mediaserver/src/conf/dc-rv1126-ipc/ipc-yuyv.conf,Pipe_0最后添加一个flow节点,配置如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
| {
"Pipe_0": {
"Flow_7": {
"flow_index": {
"flow_index_name": "test_flow",
"flow_type": "sink",
"in_slot_index_of_down": "0",
"out_slot_index": "0",
"stream_type": "file",
"upflow_index_name": "video_enc_0"
},
"flow_name": "test_flow",
"flow_param": {
"mode": "w+",
"path": "/userdata/media/photo0",
"file_prefix": "rga_test",
"file_suffix": ".jpeg",
"save_mode": "single_frame"
},
"stream_param": {}
}
},
"Pipe_1": {
},
}
|
我定义的flow_name为rga_flow,为使反射匹配成功,程序相应的getflowname函数必须返回rga_flow。
并且rga_flow的上级flow的flow_index_name为video_enc_0,video_enc_0其实就是一个编码器。
in_slot_index_of_down和out_slot_index定义了将rga_test放在上级输出槽的哪个槽以及上级处理完图像后,将图像帧输出到子级的那个输入槽。
编写flow派生类
Flow的编写可以参考ipcamera/external/rkmedia/src/flow的实现。如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
| namespace easymedia {
static bool test_flow_cb(Flow *f, MediaBufferVector &input_vector);
class TestFlow : public Flow {
public:
TestFlow(const char *param);
virtual ~TestFlow();
static const char *GetFlowName() { return "test_flow"; }
private:
friend bool test_flow_cb(Flow *f, MediaBufferVector &input_vector);
private:
std::chrono::steady_clock::time_point last_print_time_;
};
TestFlow::TestFlow(const char *param) : last_print_time_(std::chrono::steady_clock::now()){
std::map<std::string, std::string> params;
if (!parse_media_param_map(param, params)) {
SetError(-EINVAL);
return;
}
SlotMap sm;
sm.input_slots.push_back(0);
sm.thread_model = Model::ASYNCCOMMON;
sm.mode_when_full = InputMode::DROPFRONT;
sm.input_maxcachenum.push_back(0);
sm.process = rga_flow_cb;
if (!InstallSlotMap(sm, "TestFlow", 0)) {
RKMEDIA_LOGI("Fail to InstallSlotMap for FileWriteFlow\n");
return;
}
SetFlowTag("TestFlow");
}
TestFlow::~TestFlow() {
StopAllThread();
}
bool test_flow_cb(Flow *f, MediaBufferVector &input_vector) {
RGAFlow *flow = static_cast<RGAFlow *>(f);
auto &buffer = input_vector[0];
UNUSED(buffer);
long int interval =
(std::chrono::duration_cast<std::chrono::seconds>(
std::chrono::steady_clock::now() - flow->last_print_time_))
.count();
if (interval > 5) {
RKMEDIA_LOGI("TestFlow: hello world!\n");
flow->last_print_time_ = std::chrono::steady_clock::now();
}
return true;
}
DEFINE_FLOW_FACTORY(TestFlow, Flow)
const char *FACTORY(TestFlow)::ExpectedInputDataType() { return nullptr; }
const char *FACTORY(TestFlow)::OutPutDataType() { return ""; }
}
|
结果如下:
每5秒向终端输出一条内容为:TestFlow: hello world! 的日志。
本章结束
