前言
本节主要讲解STM32利用通用定时器,在输入引脚出现指定电平跳变时,将CNT的值锁存到CCR寄存器当中,从而计算PWM波形的频率、占空比、脉冲间隔、电平持续时间等。其功能的应用有:波形采样。
导航
图98 通用定时器框图:
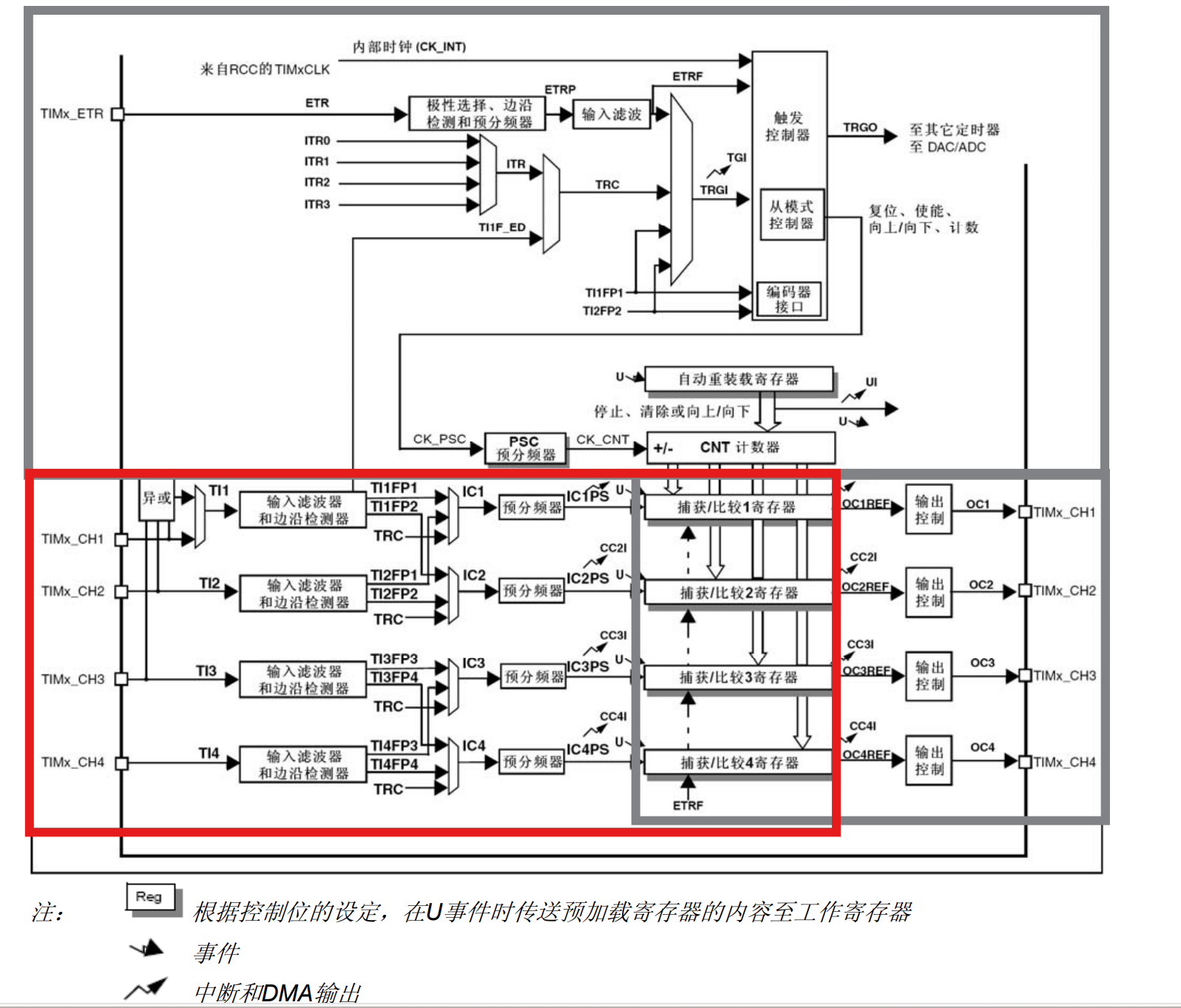
图片引自STM32 F1XX系列的中文参考手册。在通用定时器章节的定时器架构图中,本章讲解的定时器输入捕获功能位于左下角的红色矩形中。
定时器输入捕获的实现细节
参考中文手册,实现细节图123如下:
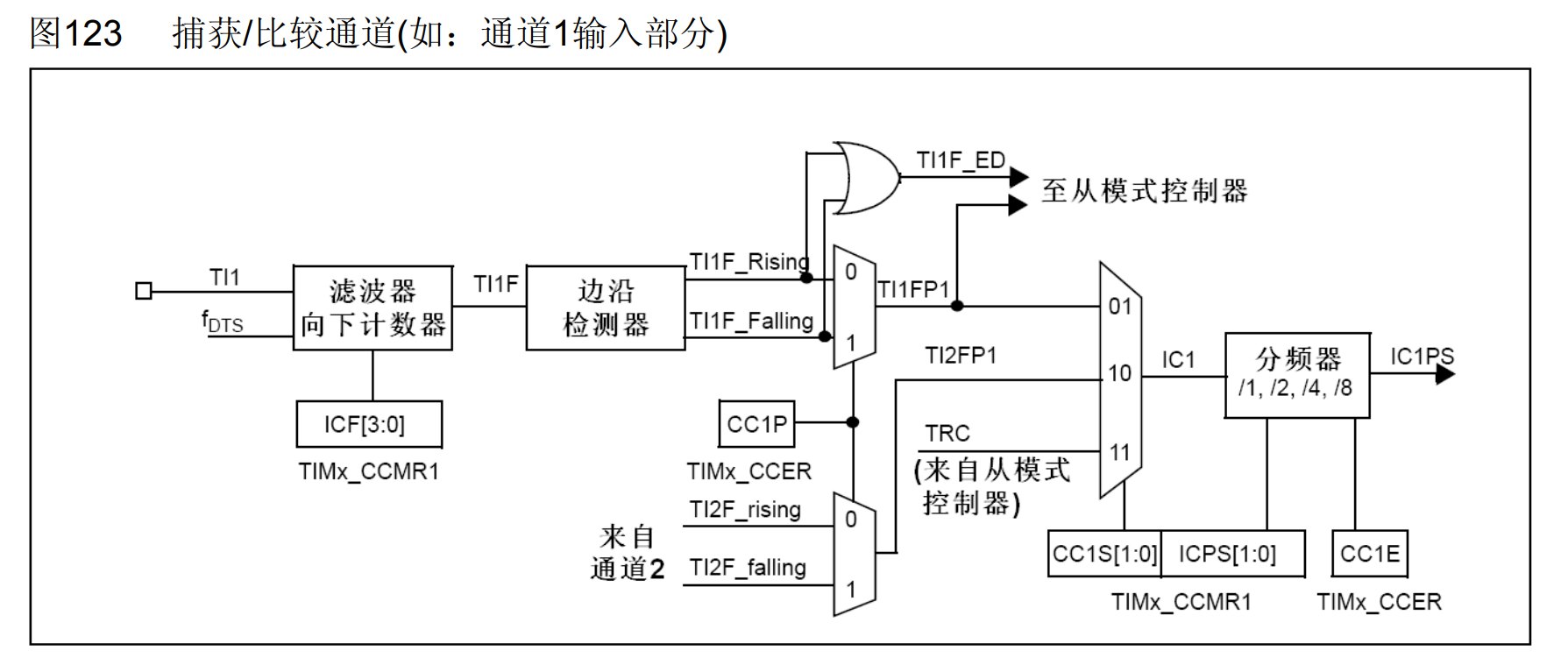
它内部实现是:根据用户设定的极性,采集输入方波信号上升沿/下降沿,将每次上升沿/下降沿的CNT寄存器的值抓取到CCR寄存器中,从而可以获取到输入信号的特性。
参考图123,从左向右介绍控制细节
对于一个通用定时器,有四个通道可作为输入(或输出),信号输入进来首先会经过滤波器进行滤波,消除不稳定的干扰信号,用户可以通过配置 TIMx_CCMR1.IC1F[7:4] 选择采样模式,可以以不同频率不同次数进行采样滤波。如下图。
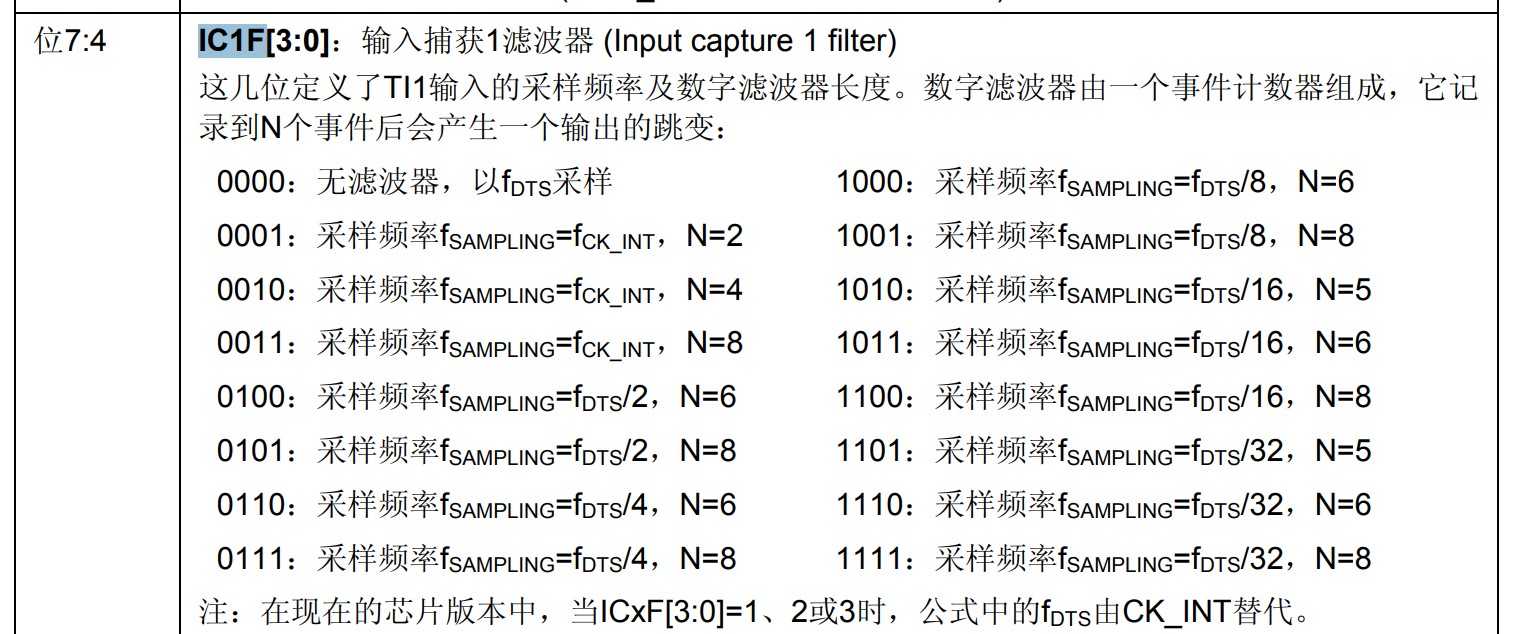
采样可选频率来源有F_CK_INT和F_DTS。其中,F_CK_INT就是定时器的内部时钟(F103默认72M HZ),而F_DTS其实间接取自F_CK_INT的分频。通过配置 TIMx_CR1.CKD[9:8] 可设置F_DTS的分频系数。如下:

经过滤波器滤波后的信号在图123中被标记为TI1F,TI1F会传入中间部分的边沿检测器,边沿检测器会根据输入的TI1F分拣出波形的每个上升沿和下降沿,根据输入信号的每一个上升沿/下降沿,向上升沿输出引脚/下降沿引脚输出一个小方波,从而给后面的选择器进行选择,图中间部分有上下两个矩形,在中文手册中,所有类似这样的矩形都是选择器, TIMx_CCER.CC1P[1] 正是通过控制选择器来实现极性的选择。经过极性选择后的波形在图123被标记为TI1FP1。图中还有一个被标记为TI1F_ED的输出,TI1FP1和TI1F_ED的区别是前者是经过选择的上升沿或是下降沿的边沿指示信号,而后者是上升沿和下降沿的边沿指示信号,频率上来讲TI1F_ED会更高。注意这里边沿指示信号和源信号的区别,我最开始看这张图的中间部分就非常迷糊。
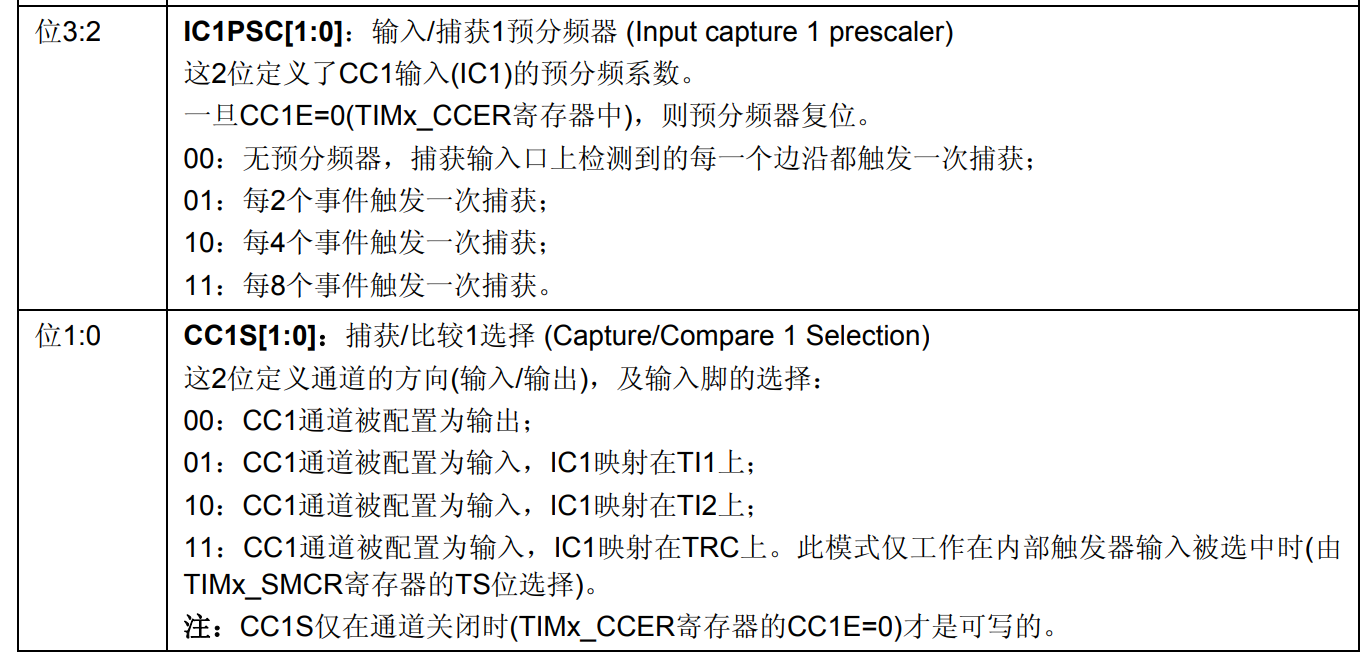
接着看右边最大的那个选择器,该选择器就是配置三路的哪一路作为IC1的输入。三路输入分别是:TI1FP1(对应TIMX_CH1)、TI2FP1(对应TIMX_CH2)、TRC(主从模式下,来自主定时器的信号),通过配置 TIMx_CCMR1.CC1S[1:0] 可以控制选择器选择哪一路。同时后面的预分频器可以通过 TIMx_CCMR1.IC1PSC[3:2] 来调节。如下图60:
最后配置使能寄存器 TIMx_CCER.CC1E[0] 就能使能定时器的输入啦!
精妙设计一
细心的读者在看到图98 红色矩形部分时,应该会注意通道TIMX_CH1和通道TIMX_CH2中间部分是存在交叉的,这里放一张特写图。
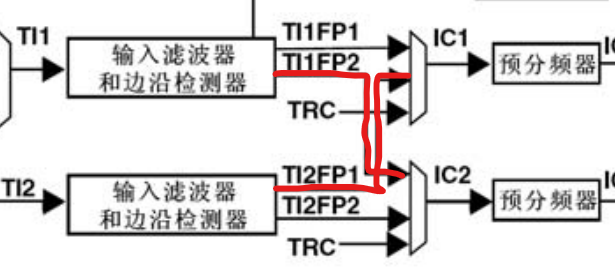
这TI1FP1和TI1FP2的信号源都是来自TIMX_CH1,图123的描述其实有些瑕疵。TI1FP1和TI1FP2的信号源相同,并且可以分别独立的控制去选择极性。也就是说完整的图123应该是有两路TI1FP的,并且可以单独的控制其极性。 如果只使用一路的捕获,我们一次只能测量信号源的频率;而有了这种交叉的设计,我们就可以实现对一个信号源,同时测量其频率和占空比。图60表述了将ICX映射到哪一路,通过配置 TIMx_CCMR1.CC1S[1:0] 可以选择。
精妙设计二
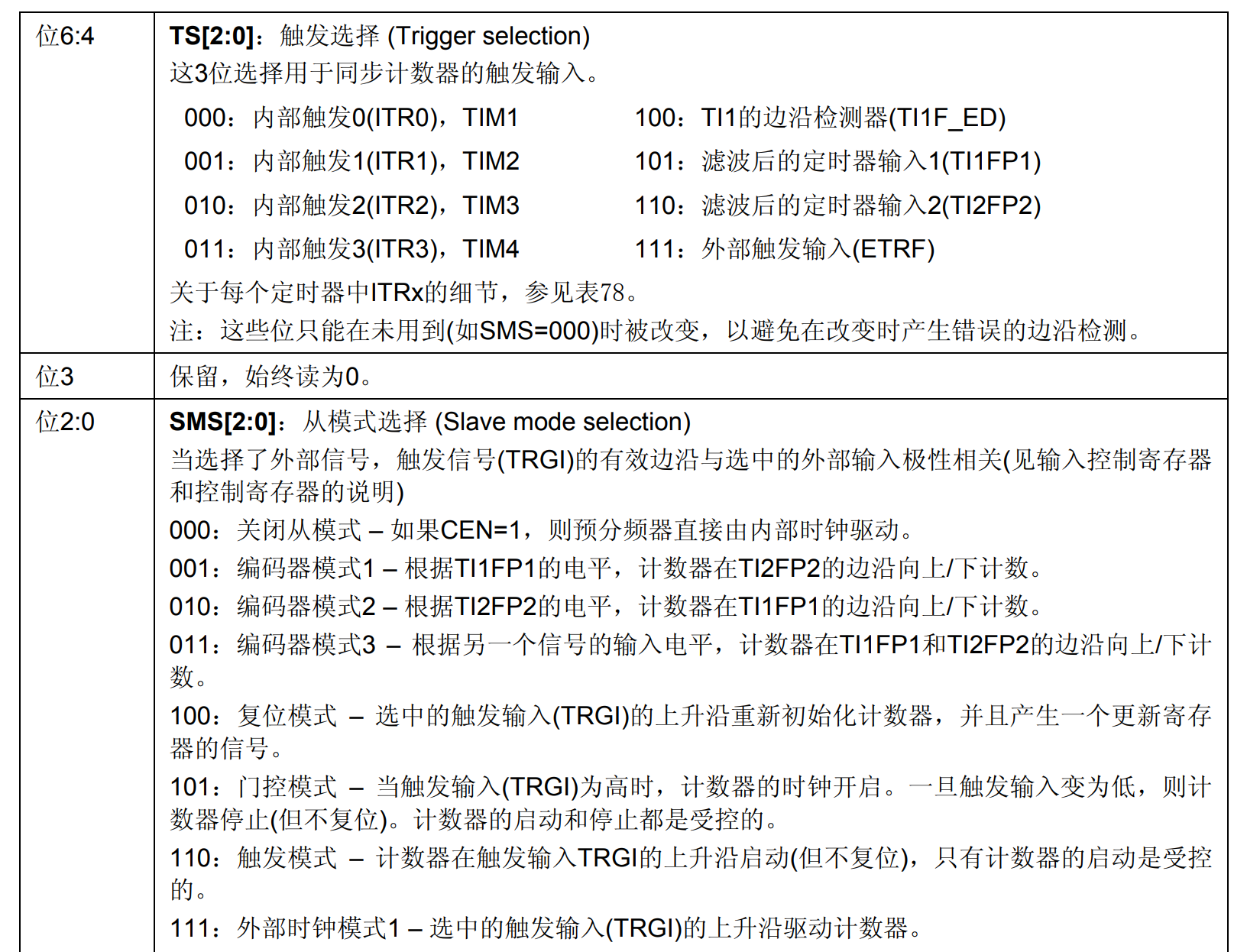
STM32 F1XX里面定时器的设计特别精妙,利用好定时器的主从模式可以实现硬件全自动化复位操作。比如:我们可以利用TI1FP1的信号实现定时器的自动复位,步骤如下:
配置 TIMx_SMCR.TS[6:4] 为101,这样滤波后的定时器输入1(TI1FP1)作为定时器触发源。 这里的主次好像是两个定时器,但实际上都是一个定时器扮演。
配置 TIMx_SMCR.SMS[2:0] 为100,这样在收到TI1FP1的触发信号就会将定时器复位。从而达到清零的目的。
涉及的寄存器如下:
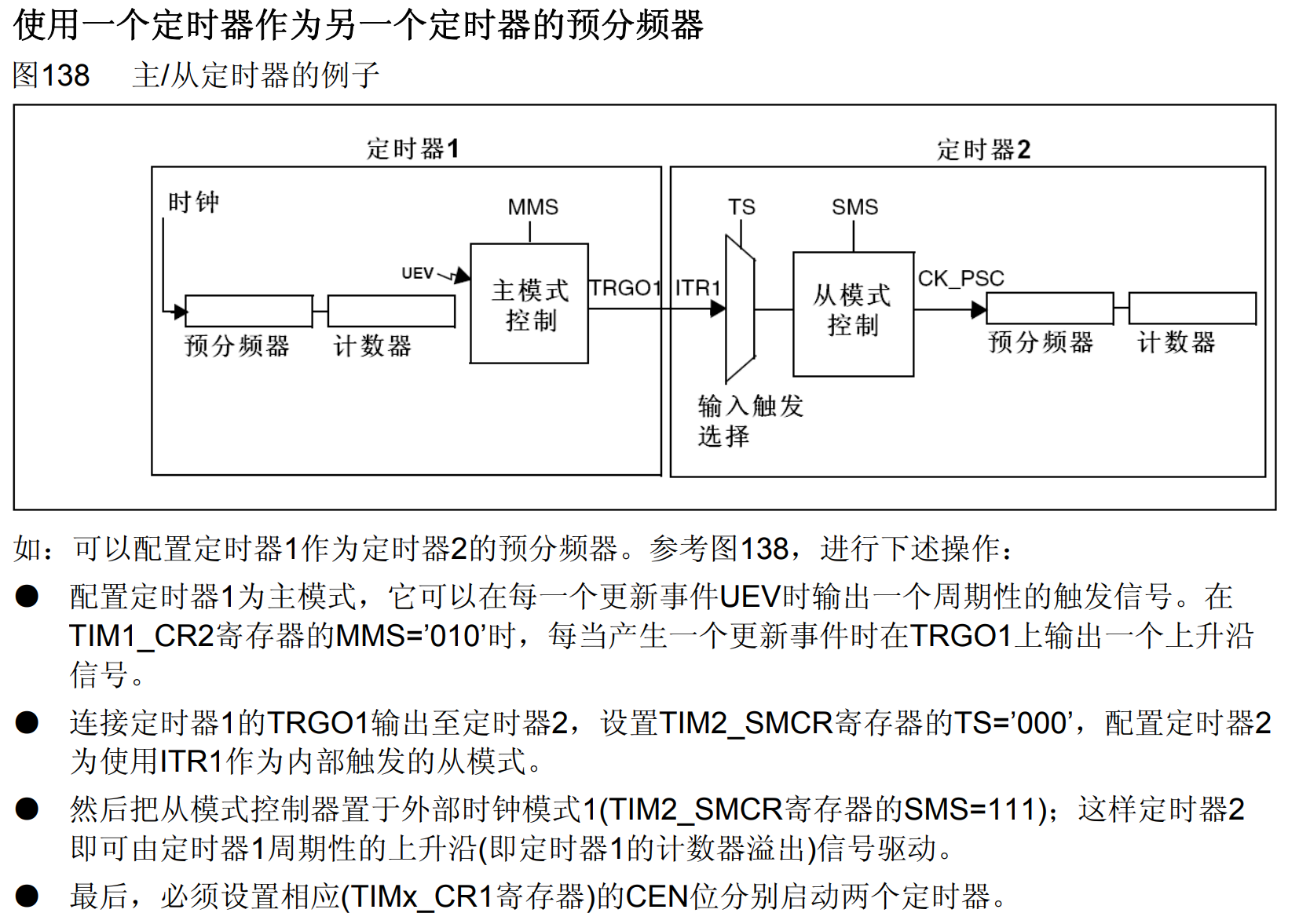
此外,还可以实现定时器级联的效果,比如使用一个定时器作为另一个定时器的预分频。根据中文参考手册配置步骤如下:
除了上面提到的用法,定时器其实还要很多奇妙的用法。具体可以查询中文参考手册。中文参考手册很多东西写的其实非常详细了,就是初学者来说,可能很难耐心去阅读。这点真的要好好锤炼,中文都看不下去,更何况以后还要接触英文的。
定时器实现输入捕获的步骤
综上,可以总结出配置定时器输入部分的套路:
通过 TIMx_CCMR1.IC1F[7:4] 配置滤波器,选择其频率和采样次数。
通过 TIMx_CCER.CC1P[1] 配置要捕获的极性(上升沿还是下降沿)。
通过 TIMx_CCMR1.CC1S[1:0] 可以配置图123中,右边那个最大的选择器,选择三路的哪一路作为IC1的来源。
通过 TIMx_CCMR1.IC1PSC[3:2] 可以配置图123中,右边那个分频器的分频系数。
通过 TIMx_CCER.CC1E[0] 可以使能捕获输入。
定时器实现输入捕获的库函数实现
本节输入捕获实验会复用定时器输出PWM(输出在PB5口)的呼吸灯实验的代码,经过查表,会将原PB5端口输出的PWM信号使用杜邦线,引到PA0端口并且作为TIM2定时器输入。 IO口需要的配置如下:


核心代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
| void LunarInitTIM3() {
GPIO_InitTypeDef GPIOB5_Cfg;
TIM_TimeBaseInitTypeDef TIM3_Cfg;
TIM_OCInitTypeDef TIM3_OCCfg;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIOB5_Cfg.GPIO_Mode = GPIO_Mode_AF_PP;
GPIOB5_Cfg.GPIO_Pin = GPIO_Pin_5;
GPIOB5_Cfg.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOB, &GPIOB5_Cfg);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseStructInit(&TIM3_Cfg);
TIM_InternalClockConfig(TIM3);
TIM3_Cfg.TIM_CounterMode = TIM_CounterMode_Up;
TIM3_Cfg.TIM_Period = 100 - 1;
TIM3_Cfg.TIM_Prescaler = 720 - 1;
TIM_TimeBaseInit(TIM3, &TIM3_Cfg);
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_OCStructInit(&TIM3_OCCfg);
TIM3_OCCfg.TIM_OCMode = TIM_OCMode_PWM1;
TIM3_OCCfg.TIM_OCPolarity = TIM_OCPolarity_High;
TIM3_OCCfg.TIM_OutputState = TIM_OutputState_Enable;
TIM3_OCCfg.TIM_Pulse = 80;
TIM_OC2Init(TIM3, &TIM3_OCCfg);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
TIM_Cmd(TIM3, ENABLE);
}
void LunarInitTIM2() {
GPIO_InitTypeDef GPIOA0_Cfg;
TIM_TimeBaseInitTypeDef TIM2_Cfg;
TIM_ICInitTypeDef TIM2_IC1Cfg, TIM2_IC2Cfg;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIOA0_Cfg.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIOA0_Cfg.GPIO_Pin = GPIO_Pin_0;
GPIOA0_Cfg.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &GPIOA0_Cfg);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseStructInit(&TIM2_Cfg);
TIM_InternalClockConfig(TIM2);
TIM2_Cfg.TIM_CounterMode = TIM_CounterMode_Up;
TIM2_Cfg.TIM_Period = 0xffff;
TIM2_Cfg.TIM_Prescaler = 720 - 1;
TIM_TimeBaseInit(TIM2, &TIM2_Cfg);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ICStructInit(&TIM2_IC1Cfg);
TIM_ICStructInit(&TIM2_IC2Cfg);
TIM2_IC1Cfg.TIM_Channel = TIM_Channel_1;
TIM2_IC1Cfg.TIM_ICFilter = 0x4;
TIM2_IC1Cfg.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM2_IC1Cfg.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM2_IC1Cfg.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInit(TIM2, &TIM2_IC1Cfg);
TIM2_IC2Cfg.TIM_Channel = TIM_Channel_2;
TIM2_IC2Cfg.TIM_ICFilter = 0x4;
TIM2_IC2Cfg.TIM_ICPolarity = TIM_ICPolarity_Falling;
TIM2_IC2Cfg.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM2_IC2Cfg.TIM_ICSelection = TIM_ICSelection_IndirectTI;
TIM_ICInit(TIM2, &TIM2_IC2Cfg);
TIM_SelectInputTrigger(TIM2, TIM_TS_TI1FP1);
TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_Reset);
TIM_ARRPreloadConfig(TIM2, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
int main() {
LunarInitUSART1();
LunarInitTIM3();
LunarInitTIM2();
SYSTick_Init();
int dir = 0, cr = 0;
while(1) {
Delay_Ms(100);
printf("PWM f = %d ", 100000 / (TIM_GetCapture1(TIM2) + 1));
printf("PWM f = %f \n", (float)(TIM_GetCapture2(TIM2) + 1) / (TIM_GetCapture1(TIM2) + 1));
}
return 0;
}
|
实验结果就是从串口中,我们可以看到PB5输出的PWM波形的频率和占空比值。
本章完结
